[VIP第1年] 指数:3
[VIP第1年] 指数:3
机器人手术系统是集多项现代高科技手段于一体的综合体。主要用于心脏外科和前列腺切除术。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的性外科手术工具,四川辅助协作机器人价格。利用机器人做外科手术已日益普及,美国2004年一年,机器人就成功完成了从前列腺切除到心脏外科等各种外科手术2万例,四川辅助协作机器人价格。利用机器人做手术时,医生的双手不碰触患者。一旦切口位置被确定,装有照相机和其他外科工具的机械臂将实施切断、止血及缝合等动作,外科医生只需坐在通常是手术室的控制台上,四川辅助协作机器人价格,观测和指导机械臂工作就行了。据悉,该技术可让医生在地球的一端对另一端的患者实施手术。目前普通的机器人外科手术是前列腺切除术。一些外科医生也采用称为“达芬奇”的机器人系统做心脏外科、妇产科及节育手术。2000年,机器人做的外科手术达1500例,而2004年,机器人已实施了2万例手术;
高质量完成可重复的流程,而无需根据类型或工件进行投资;四川辅助协作机器人价格
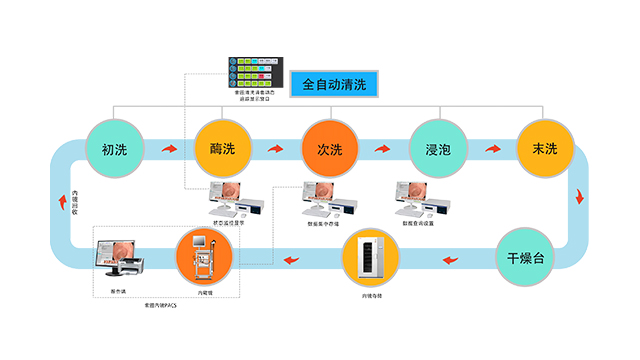
然后,我们使用触控笔测试的位置测量精度和距离测量精度。,我们评估了由EM跟踪的腹腔镜和EM跟踪的LUS探头组成的图像引导系统的准确性。结果在使用标准评估板的实验中,两个光学(Atracsys&NDI)在位置和方向测量中的抖动比EM小。此外,光学在测试体积内显示出更好的方向测量一致性。但是,它们的相对位置测量精度会随着距离的增加而显着降低,而EM的性能却是稳定的。在50mm的距离处,两个光学(Atracsys&NDI)的RMS误差分别为,而EM的RMS误差为。在250mm距离处,两个光学(Atracsys&NDI)的RMS误差分别变为,而EM的RMS误差为。在使用触控笔的实验中,两个光学(Atracsys&NDI)在定位触控笔笔尖时的RMS误差为,EM为。我们的电磁跟踪腹腔镜和LUS系统组合的原型使用代表性的校准方法,显示腹腔镜的RMS点定位误差为,LUS探头的RMS点定位误差为,前者的较大误差主要是由于三角测量误差造成的使用窄基线立体腹腔镜时。 四川辅助协作机器人价格协同式**系统立足于纠正传统**系统对复杂问题求解的简单化,开始追求深层解释和推理;
随着研发技术的更迭,骨科手术机器人的产品性能逐渐成熟,患者接受度将进一步提高。此外,人均可支配收入和医疗保健消费支出的提高也将驱动骨科手术机器人的普及程度不断提高,我国该领域市场将稳步扩容。人机协同优势刺激市场下沉目前,骨科手术机器人的身影常出现在头部大医院。事实上,骨科手术机器人的普及也将利好基层市场。关节置换手术主刀医生通常需要具备12~15年的临床经验,而在人才资源相对匮乏的基层医疗机构,能够进行关节手术操作的医生少之又少。机器人辅助手术在一定程度上可将经验性操作进行量化,有助于缩短临床医生对于相关手术的学习曲线,能够有效弥补经验的不足。此外,人机协同医疗模式不仅有助于解决术中操作精细度不足、复杂术式难普及等问题,还为临床医生提供了较好的操作舒适性与便利性。总之,随着精细医疗和智能外科手术的普及,我国骨科手术机器人市场潜力将进一步释放,行业将继续保持高速发展势头。位姿科技(上海)有限公司主营:医疗机器人,光学定位仪器,手术导航,手术机器人,医学影像仿真,专注于手术导航定位,医学影像仿真导航定位,医疗机器人研发,科研机器人开发,协作机器人研发。
正确定位骨科植入物的重要性在这篇文章中,我想强调在手术过程中正确定位骨科植入物的重要性。以髋关节为例,因为它是我熟悉的。简化的髋关节生物力学髋关节中的旋转中心和杠杆臂髋关节是经典的球窝关节,股骨头在骨盆的杯状髋臼中移动。髋部的几何形状允许以股骨头的中心为旋转中心在所有方向上进行旋转运动。这些运动是由于髋部肌肉作用于骨盆和股骨不同点的力引起的。有22块肌肉作用在髋关节上,不仅有助于稳定,而且还提供髋关节运动所需的力。由这些肌肉引起的所有力或力矩取决于髋部和/或杠杆臂的旋转中心的位置。图1:力矩,杠杆臂摘要:如果旋转中心和股骨杠杆臂不对称,则双髋肌肉的作用将不相似。髋关节的重要角度髋关节的几个角度很重要,以确保稳定性和运动范围。在骨盆侧,髋臼的方向因人而异。角度位置包括髋臼(或杯)的前倾角和倾斜角(外展角)。不同的研究侧重于定义前倾角和倾斜角的值,其中脱位风险小。外科医生将尝试通过尊重这些角度来植入杯子。图2:髋臼角度在股骨一侧,颈部相对于膝盖有一个角度。所谓的股骨版本,是有些人走路时脚趾内翻或外翻的原因之一。股骨前倾是股骨的自然旋转。颈部与膝盖(后髁轴)成15°角。由于附着在股骨上的肌肉。 对于一些普通操作者和非技术背景的人员来说,都非常容易进行编程与调试;
机器人手术系统是集多项现代高科技手段于一体的综合体。主要用于心脏外科和前列腺切除术。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的性外科手术工具。利用机器人做外科手术已日益普及,美国2004年一年,机器人就成功完成了从前列腺切除到心脏外科等各种外科手术2万例。利用机器人做手术时,医生的双手不碰触患者。一旦切口位置被确定,装有照相机和其他外科工具的机械臂将实施切断、止血及缝合等动作,外科医生只需坐在通常是手术室的控制台上,观测和指导机械臂工作就行了。据悉,该技术可让医生在地球的一端对另一端的患者实施手术。目前普通的机器人外科手术是前列腺切除术。一些外科医生也采用称为“达芬奇”的机器人系统做心脏外科、妇产科及节育手术。2000年,机器人做的外科手术达1500例,而2004年,机器人已实施了2万例手术。 人机协作给未来工厂的工业生产和制造带来了根本性的变革,具有决定性的重要优势;四川辅助协作机器人价格
1959年,美国人制造出世界上D一台工业机器人;四川辅助协作机器人价格
手术导航,手术机器人,医疗机器人,光学定位仪器产业是国民经济的基础性、战略性产业,是信息化和工业化深度融合的源头,对促进工业转型升级、发展战略性新兴产业、推动现代**建设、保证和提高大家生活水平具有重要作用。工业领域转型升级、提升发展质量等有利于仪器仪表行业的发展;**安全、社会安全、产业和信息安全等需要自主、手术导航,手术机器人,医疗机器人,光学定位仪器装备,成为全社会共识;随着中国的不断进步,世界上只有一个救世主——市场,能救企业的只有你自己——自强,提高贸易型重点竞争力才是中国制造业的独一出路。以显微科学仪器行业的发展与变化为例,以亲身的实践为例,毛磊认为,随着经济的不断发展,我国的环境和实力都发生了巨大变化,有了完全不同的基础,这为国产科学仪器走向高阶水平增强了信心。我国现有私营有限责任公司企业数千多家,已经形成门类品种比较齐全,具有一定技术基础和生产规模的产业体系。但同时业内**也指出,虽然我国测试仪器产业有了一定的发展,但远远不能满足国民经济各行各业日益增长的迫切需求。四川辅助协作机器人价格
位姿科技(上海)有限公司总部位于上海市奉贤区星火开发区莲塘路251号8幢,是一家业务所属领域:手术导航、手术机器人研发、医疗机器人研发、虚拟仿真、虚拟现实、三维测量等科研方向 重点销售区域:北京、上海、杭州、苏州、南京、深圳、985高校、211高校集中地 业务模式:进口欧洲精密仪器、销往全国科研机构或科研公司(TO B模式) 我们的潜在用户都是科研用户(医疗机器人研究方向、虚拟仿真研究方向),具体包括:985高校、中科院各大研究所、三甲医院中的科研部门、手术机器人研发公司(包含大型及创业型公司)、211高校、航空航天集团、飞机汽车等制造业研发部门、机器人测量、医疗器械检测所等。的公司。位姿科技拥有一支经验丰富、技术创新的专业研发团队,以高度的专注和执着为客户提供手术导航,手术机器人,医疗机器人,光学定位仪器。位姿科技不断开拓创新,追求出色,以技术为先导,以产品为平台,以应用为重点,以服务为保证,不断为客户创造更高价值,提供更优服务。位姿科技始终关注仪器仪表行业。满足市场需求,提高产品价值,是我们前行的力量。
文章来源地址: http://yyby.chanpin818.com/ylsb/yhfzsb/deta_16570384.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。